「この搬送コンベアはインバータだけど、こっちの昇降機にはサーボを使うぞ」
現場で図面を見ていると、当たり前のように使い分けられていますよね。 新人君に「なんでですか? インバータじゃダメなんですか? サーボってなんであんなに高いんですか?」と聞かれたら、どう答えますか?
「精度が良いから」なんて答えじゃ、エンジニアとしては50点です。 「じゃあなんで精度が良いの?」と突っ込まれたら終わってしまいますからね。
今日は教科書の難しい言葉は抜きにして、数々の装置調整を行ってきた現役設計者が現場でイメージしている「サーボが動く理屈」を教えます。 キーワードは、「目隠し」と「借金」です。
結論から言うと、インバータとサーボの違いは「結果に対して責任を持つかどうか」です。
……ですが、それだけ理解しても現場では通用しません。 なぜなら、責任感が強すぎるあまりに暴走する「ハンチング」というトラブルが待ち受けているからです。 その原因である「借金(偏差)」の正体について、詳しく解説します。
決定的な違い:「やりっぱなし」か「確認するか」
結論から言うと、インバータ(汎用モーター)とサーボモーターの違いは、「結果に対して責任を持つかどうか」です。 かっこよく言うと、開ループ(オープンループ)か閉ループ(クローズドループ)かの違いですね。
インバータは「目隠しのピッチャー」
一般的なインバータ制御(V/f制御)は、モーターに対して「60Hz(速度)で回れ!」と電気を送るだけです。
これを野球のピッチャーに例えると、「目隠しをしてボールを投げている」状態です。 「ストライクゾーン(指令)」に向かって投げたつもりでも、実際にボールがどこに入ったか、キャッチャーが取れたか(負荷がどうなったか)は、インバータ自身は知りません。
- ベルトが切れて空回りしていても気づかない。
- 荷物が重すぎて回転数が落ちても、電気を送り続けるだけ。
これでは、「ボールを3個分右に投げて(=1mm単位の位置決め)」なんて怖くて任せられませんよね。投げた結果が見えていないのですから。
サーボは「結果を見る管理者」
一方、サーボモーターのお尻には「エンコーダ」というセンサ(目)が付いています。 こいつが「今、何度回ったか」を常に見張っています。
指令を出した後、「で、実際どうなった?」と結果(フィードバック)を確認し、ズレていればその場で修正します。これが「フィードバック制御(閉ループ)」です。
この「確認作業」をしているからこそ、サーボは僕らの期待通りに動いてくれるわけです。

サーボの心臓部:「偏差カウンタ」を理解せよ
ここから少しだけ中身の話をします。 サーボアンプの中には、「偏差カウンタ(溜まりパルス)」という箱があります。 これを理解すると、現場でのトラブル(ハンチングや異音)の原因が手に取るように分かるようになります。
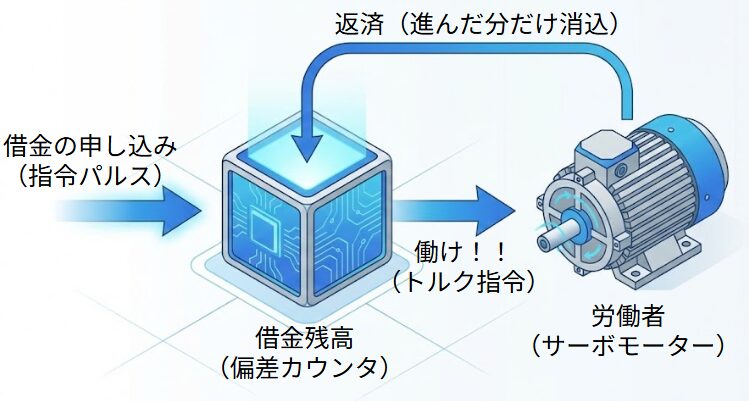
イメージはずばり、「借金返済」です。
- 指令パルス(借金発生): PLCから「1000パルス進め」という指令が来ると、偏差カウンタに「+1000」溜まります。これが「やらなきゃいけない仕事(借金)」です。
- モーター回転(返済開始): サーボアンプは「借金があるぞ!働け!」とモーターに電流を流します。モーターが回ると、エンコーダからパルスが返ってきます。
- フィードバック(消し込み): 1パルス進むごとに、偏差カウンタから「-1」されます。
- 完済(位置決め完了): 偏差カウンタの中身が「0」になった瞬間、モーターは止まります。
「遅れる」と「強くなる」理由
もし、荷物が重くてモーターがなかなか回らなかったらどうなると思います? PLCからは次々と指令(借金)が来るのに、返済(回転)が追いつきません。すると、偏差カウンタの中身(溜まりパルス)がどんどん増えていきます。
するとサーボアンプはこう考えます。 「おい! 借金(偏差)が減らないぞ! さっきより強い電流(トルク)を出して無理やりにでも回せ!!」
これが、サーボが負荷変動に強い理由です。「遅れたら、その分だけ本気を出して取り戻す」という仕組みが、物理的に組み込まれているんです。
なぜ「ハンチング(振動)」するのか?
この「借金返済」の仕組みがわかると、現場でよくあるトラブル「ハンチング」の原因も見えてきます。
偏差カウンタを「0」にしようと必死になるあまり、勢いよく回しすぎて「通り過ぎて」しまったら? 今度は「マイナス(行き過ぎ)」という借金ができるので、慌てて「逆回転」して戻そうとします。
- 行き過ぎる(オーバーシュート)
- 戻しすぎる(アンダーシュート)
- また行き過ぎる…
これを繰り返して「ウワンウワン」と唸っている状態がハンチングです。 要するに、「真面目すぎて、加減を知らない状態」なんですね。
これを「ちょうどいい湯加減」に調整してあげる作業こそが、次回解説する「ゲイン調整」です。

まとめ:サーボは「ズレ」を許さない
- インバータ: 指令を出すだけの「やりっぱなし制御」。
- サーボ: エンコーダで監視する「フィードバック制御」。
- 仕組み: 「偏差(借金)」がゼロになるまで、意地でもモーターを回そうとする。
この「偏差カウンタ」のイメージを持って現場の機械を見てみてください。 「完了信号が出ないのは、まだ借金(溜まりパルス)が残ってるからだな」 「ゲインを上げるってことは、借金の取り立てを厳しくするってことか」
そう考えると、今まで意味不明だったパラメータが少し可愛く見えてきませんか?
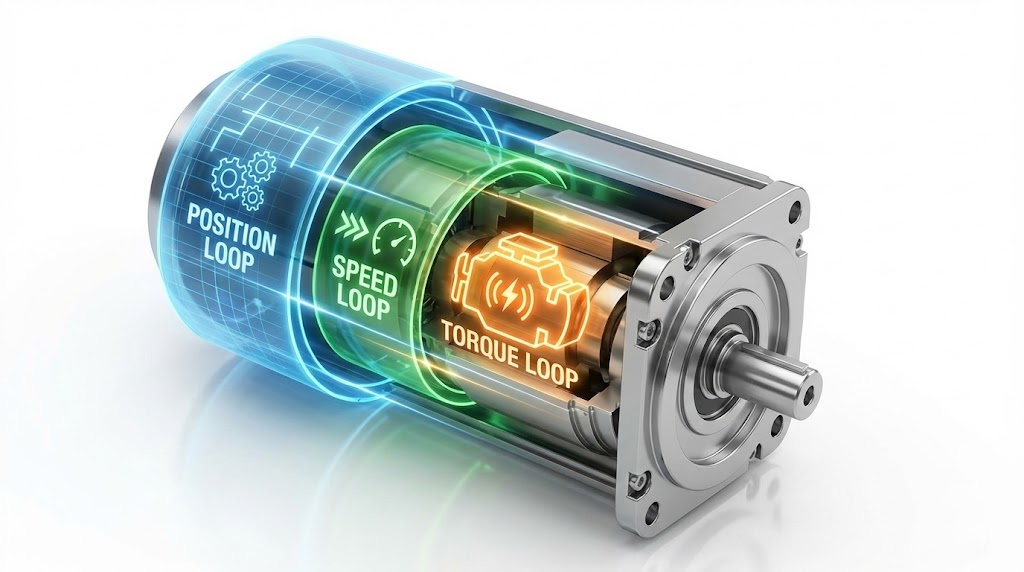
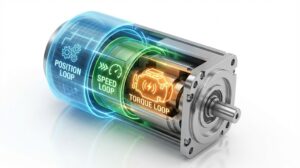
次回は、この制御をさらに深掘りして、サーボ内部にある「3つの制御ループ(位置・速度・トルク)」について解説します。 「位置決めが遅い!」と悩んでいる方、必見です。
サーボ制御マスターへの道(実務力強化ロードマップ)
サーボモータは「回ればいい」ものではありません。狙った通りにピタッと止め、振動を抑え、安全に稼働させて初めて「制御」と呼べます。
以下の記事を順に読み進めれば、現場で「なんとなく」触っていたサーボのパラメータや挙動が、理論の裏付けを持って理解できるようになります。 「とりあえずオートチューニング」から卒業し、自分の意図でモータを操れるエンジニアを目指しましょう!