「ワンタッチ調整、完了! ゲインも上がったし、モーター軸はガチガチに固まったぞ!」
意気揚々と試運転をしてみると……。 モーター自体はピタッと止まっているのに、長いアームの先端についたワークが、停止後に「ポヨン……ポヨン……」と揺れ続けている。
「くそっ、ゲイン不足か? もっと上げなきゃ!」 ストップ! 数々の振動トラブルを解決してきた現役エンジニアとして断言しますが、その操作は逆効果です。
その「ポヨン」という揺れは、ゲインを上げても止まりません。 むしろ、上げれば上げるほど悪化することさえあります。
それは「ゲイン不足」ではなく、「残留振動」という別の敵だからです。 今回は、J5が持つ「遠隔地の揺れを止める予知能力(アドバンスト制振制御II)」について解説します。
結論から言うと、この機能は「未来を予知する幽霊(モデル)」を使って、揺れを打ち消しています。
……ですが、何でもかんでもこの機能を使えばいいわけではありません。 現場には使ってはいけない「キーン(共振)」という敵もいます。 この2つの違いを間違うと、機械が暴走します。まずは「敵の見分け方」から始めましょう。
「キーン」と「ポヨン」は敵の種類が違う
まず、振動には大きく分けて2種類あることを理解しましょう。 ここを間違えると、風邪なのに胃薬を飲むようなことになります。
1. 機械共振(高周波:数百Hz〜)
- 音・動き: 「キーン!」「ガガガッ!」という金属的な異音。
- 原因: ゲインを上げすぎて、機械のバネ成分が過敏に反応している状態。
- 対策:「ノッチフィルタ」(前回のワンタッチ調整で入れたやつ)。
- これは「特定の周波数の指令を出さない」という「口封じ・耳栓」のアプローチです。
※ノッチフィルタについては、前回の記事で詳しく解説しています。

2. 残留振動(低周波:〜100Hz)
- 音・動き: 「ポヨン……」「グラグラ……」という目に見える揺れ。
- 原因: アームが長く、急停止した勢いで「釣り竿」や「高層ビル」のようにしなっている状態。
- 対策:「制振制御」。
- これは耳栓では直りません。「運転の仕方」そのものを変える必要があります。
今回戦うのは、2番目の「ポヨン」です。
センサーもないのに、なぜ止められる?
不思議に思いませんか? サーボモータにはエンコーダ(位置センサ)が付いていますが、それはあくまで「モーターのお尻」の話です。 1メートル先のアームの先端には、センサーなんて付いていません。
それなのに、なぜアンプは「あ、今先端が揺れてるな」と分かり、それを止めることができるのでしょうか?
アンプの中に「幽霊(ゴースト)」がいる
実は、サーボアンプの中では、マリオカートのタイムアタックのようなことが行われています。 あなたの機械と一緒に、「理想の走りをする幽霊(モデル)」が走っているのです。
- 幽霊(モデル)が先行する
- 指令が入ると、アンプの中でまず「重さも摩擦もない、完璧に動く幽霊」が走ります。
- 現実のモーターが追いかける
- 現実のモーター(重いアーム付き)は、この幽霊に遅れないように必死でついていきます。
これが、J5の内部で行われている制御(モデル追従)のイメージです。 アンプは常に「幽霊ならこう動くはずだ」という計算(予知)をしています。
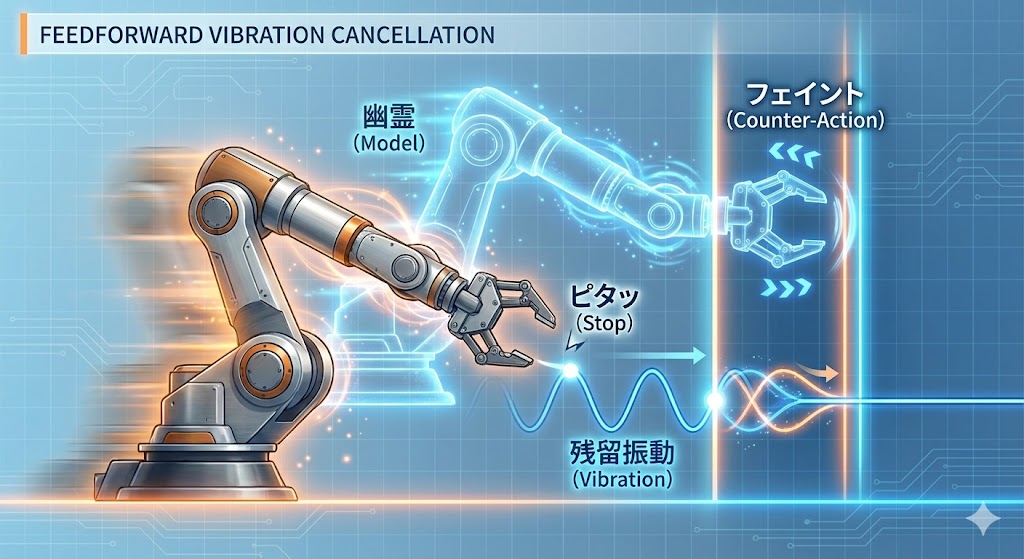
幽霊が「フェイント」をかけて揺れを消す
では、どうやって揺れを止めているのか? ここで「制振制御」のスイッチを入れると、先頭を走る幽霊がプロの技を使い始めます。
もし普通に急停止したら、後ろをついてきた現実のアームは、勢いで「おっとっと(ポヨン)」と揺れてしまいますよね。 そこで、幽霊はこう動きます。
- 止まる瞬間に「バック」する
- 幽霊は、目的地で止まる直前に、一瞬だけ「クニュッ」と逆方向(バック)に動くフェイントをかけます。
- 現実のモーターも真似する
- 「えっ、そこでバックするの!?」と驚きつつ、現実のモーターもその動きを真似します。
- 結果、揺れが消える
- その「バックする動き(カウンター)」が、ちょうどアームが前に「ポヨン」と揺れる力を打ち消し、ピタッと静止します。
これが制振制御の仕組みです。 センサーで揺れを見ているのではなく、「こう動けば揺れが消えるはずだ」と計算されたフェイント動作(指令)を、幽霊が実行しているのです。
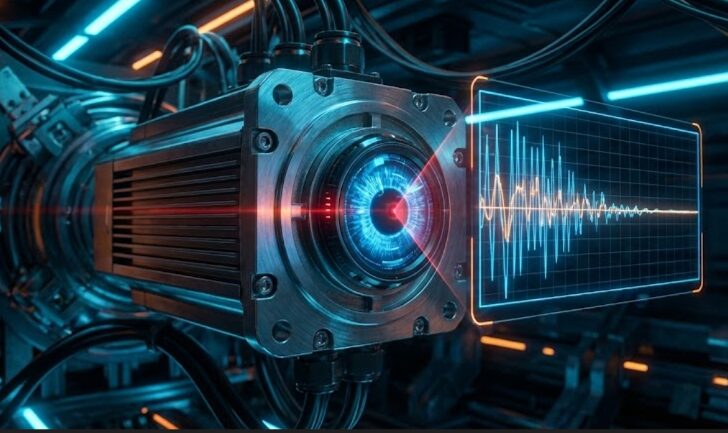
【証拠】波形で見ると一目瞭然
「本当にそんなことやってるの?」と疑う人のために、実際の波形を見てみましょう。 制振制御をONにすると、モーターへの指令波形が明らかに変化します。
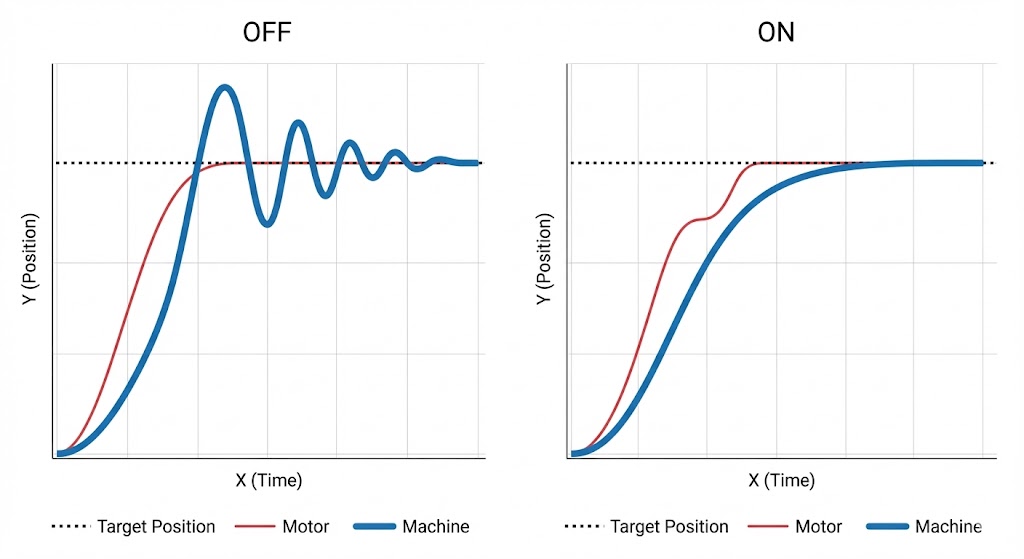
- 左:制振制御OFF(通常の制御)
- 赤い線(モーター)を見てください。 目標位置(点線)でオーバーシュートせず、ピタッと止まっています。 つまり、ゲイン調整は成功している(モーターは硬い) のです。
- 青い線(機械の先端)を見てください。 モーターは止まっているのに、アームの先端だけが勢いで行き過ぎてしまい、ポヨンポヨンと波打っています。 これこそが「ゲインでは止められない揺れ(残留振動)」の正体です。
- 右:制振制御ON(プロの技)
- 赤い線(モーター)の「形」に注目! 普通ならスッと上がるはずが、ゴールの手前でクネッと曲がったり、独特なカーブ(段差)を描いていますよね? これがアンプ(幽霊)がかけた「フェイント(補正)」です。
- 青い線(機械の先端)はどうなった? モーターがあえて変な動きをしてくれたおかげで、行き過ぎることなくピタッと目標ラインに着地しています。
もし現場で、停止直前にモーターが「ククッ」と不思議な動きをしていたら、それは右のグラフ(赤い線)のような高度な制御を行っている証拠です。 故障ではありませんので、温かく見守ってください。
【要注意】「ノッチフィルタ」とは別物です!
ここでよくある勘違いが、「あ、揺れを消すのね! じゃあノッチフィルタを入れればいいんでしょ?」 というもの。
絶対にダメです。 似ていますが、役割は正反対です。
- ノッチフィルタ(機械共振抑制フィルタ):
- 特定の周波数を「カット(削除)」するもの。
- 高周波(キーン音)には有効ですが、低周波(ポヨン揺れ)にこれを使うと、指令がスカスカになって制御不能(暴走)になる危険があります。
- 制振制御(アドバンスト制振制御II):
- 指令を削除するのではなく、「変形(フェイント)」させるもの。
- 低周波の揺れには必ずこちらを使ってください。
「ポヨン」には制振制御、「キーン」にはノッチフィルタ。 風邪薬と胃薬くらい違うので、間違えないようにしましょう。
実践:どうやって設定する?
「理屈は分かった。で、どうすればいいの?」 設定方法は、機械の状況に合わせて以下の2つのルートがあります。
ルートA:搬送・回転など(負荷変動なし)
迷わず「ワンタッチ調整」ボタンを押してください。 これが最強です。往復動作の中で「あ、停止後にポヨンと揺れたな」と検知すると、自動的に制振制御のパラメータ(PB02, PB19〜)を設定してくれます。
ルートB:アーム伸縮・把持など(負荷変動あり)
負荷が変わる機械では「オートチューニング(リアルタイム)」を使いますが、それだけでは「制振制御」は機能しません。 そのため、以下の手順で「揺れ止め機能」だけをONにします。
【手順1】まずは「半自動」を試す(推奨) いきなり難しい測定をする必要はありません。アンプに「揺れを探してね」とお願いするモードがあります。
- PB02(制振制御チューニングモード) を 「1(自動設定)」 に書き換えます。
PB02.0(制振制御1)とPB02.1(制振制御2)の両方を「1」にすると確実です。
- いつも通り運転する
- 装置を動かすと、アンプが「あ、今揺れたな」と検知して、自動的に
PB19〜PB22に最適な数値を入れてくれます。 - 調整が終わると、PB02は自動的に完了状態に戻ります。
- 装置を動かすと、アンプが「あ、今揺れたな」と検知して、自動的に
【手順2】それでも止まらない時は「最終手段」 自動設定でも揺れが止まらない(検知できない)場合のみ、人間の出番です。
- マシンアナライザで「山」を探す
- MR-Configurator2の「マシンアナライザ」を実行します。
- 10Hz〜100Hzくらいの低い領域に、ボコッと盛り上がった「山(ピーク)」がないか探します。それが「ポヨン」の正体(振動周波数)です。
- パラメータに入力する
- 見つけた周波数と波形から以下のパラメータを入力します。詳細はマニュアルを確認してください。
- PB19~22(制振制御1のパラメータ)
- PB52~55(制振制御2のパラメータ)
- 見つけた周波数と波形から以下のパラメータを入力します。詳細はマニュアルを確認してください。
- 効果確認
- これだけで、嘘のように揺れが止まるはずです。
まとめ:ゲインで深追いするな
- 「キーン(共振)」と「ポヨン(揺れ)」は別物。対策も別。
- 「ポヨン(揺れ)」はゲインアップではなく、「制振制御」で止める。
- 制振制御は、指令にフェイント(カウンター)を混ぜて物理的に揺れを消している。
- オートチューニングでは制振制御はかからないので、ワンタッチ調整を使うべし。
アームの先端が揺れている時、やみくもにゲインをいじるのは「下手なウエイター」です。 J5の機能を正しく使い、「魔法のようにピタッと止める」プロの調整を見せつけてやりましょう。
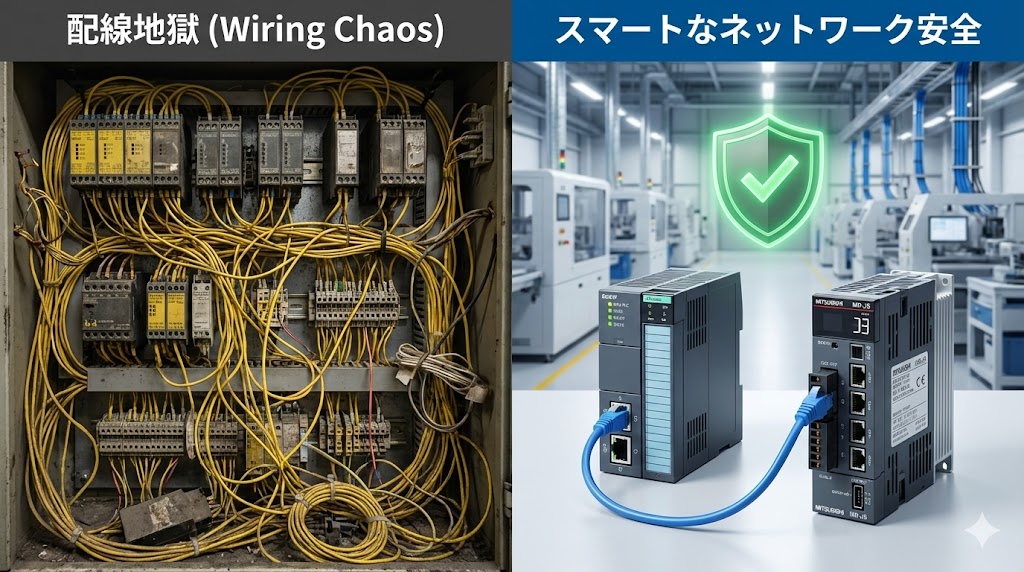
次回は、昨今の製造現場で避けて通れない「ネットワークの安全」について。 CC-Link IE TSNなどで繋がったJ5が、どうやって安全を守っているのか? 「機能安全」の世界へ足を踏み入れます。

サーボ制御マスターへの道(実務力強化ロードマップ)
サーボモータは「回ればいい」ものではありません。狙った通りにピタッと止め、振動を抑え、安全に稼働させて初めて「制御」と呼べます。
以下の記事を順に読み進めれば、現場で「なんとなく」触っていたサーボのパラメータや挙動が、理論の裏付けを持って理解できるようになります。 「とりあえずオートチューニング」から卒業し、自分の意図でモータを操れるエンジニアを目指しましょう!