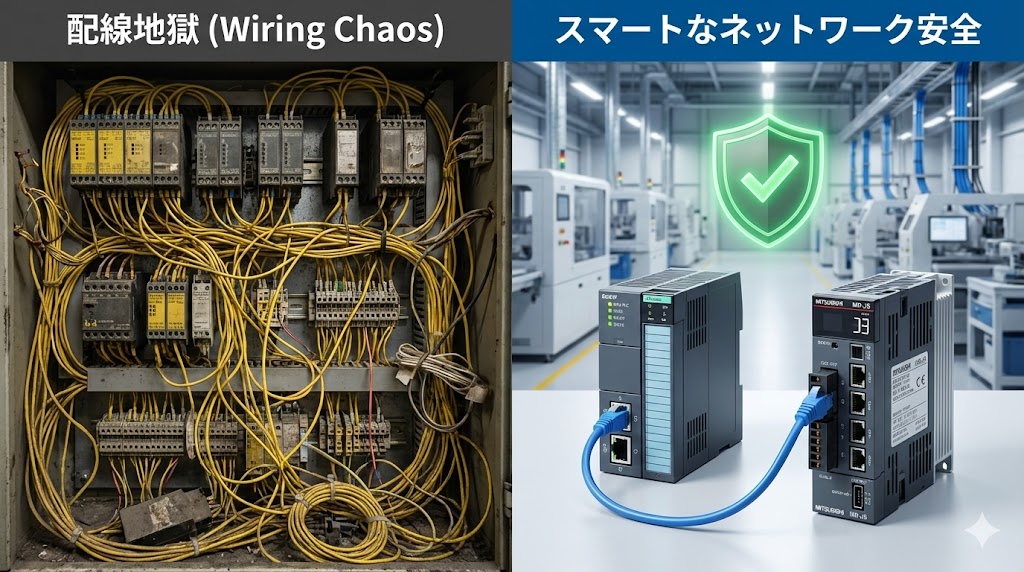
「安全リレーの配線がスパゲッティ状態で、追加工事ができない……」 「非常停止を押すと全電源が落ちて、復旧に時間がかかりすぎる……」
そんな「安全回路」の悩みを抱えていませんか?
安全対策は重要ですが、リレーと電線で組むハードウェア方式だけでは、制御盤のスペースも設計の手間も限界が来てしまいます。
私はFAエンジニアとして、数多くの装置立ち上げに関わってきました。その経験から断言できるのは、MR-J5の「機能安全(ネットワークセーフティ)」を使えば、その悩みはLANケーブル1本ですべて解決できるということです。
この記事では、MR-J5とCC-Link IE TSNを組み合わせた「ネットワーク安全」の仕組みと、STOやSS1といった専門用語を、現場目線で分かりやすく解説します。
結論から言うと、これからの安全は「物理配線で電源を切る」のではなく、「通信で監視し、止める」のが正解です。
……ですが、いざ導入しようとカタログを開くと、「STO」「SS1」「SOS」といった謎の呪文(アルファベット)が並んでいて挫折しそうになりませんか? これらの違いを正しく理解し、使いこなすための「翻訳ガイド」を用意しました。
ハードワイヤー接続方式 vs ネットワーク方式(配線と仕組みの違い)
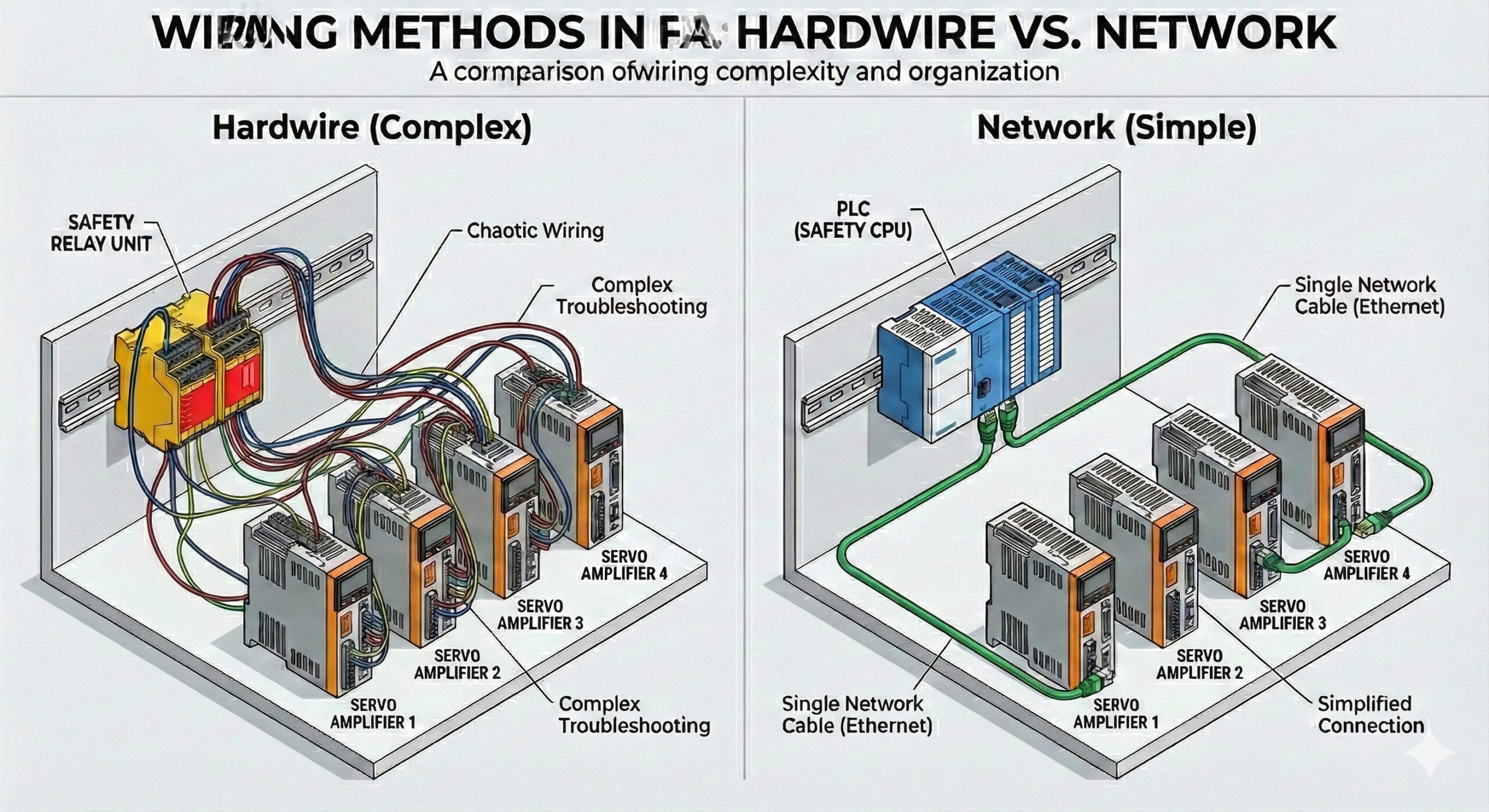
まず、安全回路の組み方がどう変わるのか、その違いを押さえましょう。 ここを理解すると、なぜ「配線が減るのか」が見えてきます。
1. ハードワイヤー接続
- 仕組み: 安全リレーユニットから、アンプのコネクタ(CN8)へ物理的な配線(STO線)を接続する。
- メリット: 構造がシンプルで、実績も豊富。
- デメリット:
- 軸数が増えると、安全リレーから各アンプへの渡り配線が膨大な量になる。
- 「扉が開いたら、この2軸だけ止めたい」といった回路変更が大変。
2. ネットワーク方式(機能安全)
- 仕組み: 安全CPU(PLC)からネットワーク(CC-Link IE TSN)経由で、「止まれ」という信号を送る。
- メリット:
- CN8への配線が不要。 LANケーブル1本で通信も安全信号も送れる。
- 「どの軸をどう止めるか」をラダープログラム上で自由に変更できる。
MR-J5はどちらも対応していますが、今回の主役は、配線を劇的に減らせる「2. ネットワーク方式」です。
【図解】STOやSS1とは? 現場で頻出する5つの呪文
カタログにあるたくさんの機能の中から、現場で特によく使う5つをピックアップして翻訳しました。 前半の3つ(STO, SS1, SS2)は、国際規格で定められた「停止カテゴリ 0, 1, 2」に完全に対応しています。
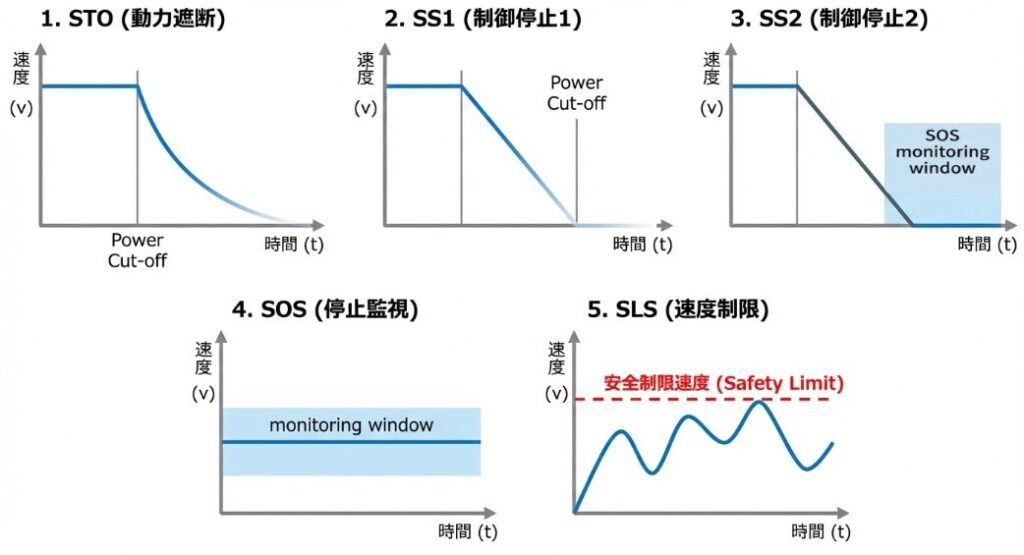
1. STO(Safe Torque Off)
- 停止カテゴリ:0
- 翻訳:【動力遮断(フリーラン)】
- 動き: 瞬時にモーターへの電力供給(トルク)を遮断します。
- 特徴: 最も基本的な機能です。従来、マグネットコンタクタ(MC)で主電源をバチンと切っていたのと同じ状態です。
2. SS1(Safe Stop 1)
- 停止カテゴリ:1
- 翻訳:【減速してから遮断】
- 動き: いきなり切るのではなく、モーターの力で「ググッ」とブレーキをかけて停止(減速)させます。停止を確認した後で、動力を遮断(STO)します。
- メリット: 高速回転しているロールなどを、惰性で回し続けずに短時間で安全に止めることができます。
3. SS2(Safe Stop 2)
- 停止カテゴリ:2
- 翻訳:【減速してからSOSへ】
- 動き: モーターの力で減速停止させるところまではSS1と同じですが、止まった後に動力を切りません。
- 特徴: 停止したことを確認すると、自動的に「SOS(停止監視)」機能を実行します。 つまり、「止めて、そのまま踏ん張らせる」ための導入機能です。
4. SOS(Safe Operating Stop)
- 翻訳:【停止維持(位置監視)】
- 動き: SS2などで止まった後、「電源とトルク(保持力)を入れたまま」、現在位置から動かないことを監視します。もし位置がズレたら即座にSTOします。
- メリット: ロボットが踏ん張ったまま待機できるので、「ワークを掴んだまま」人間が安心して作業を行えます。復旧も最速です。
5. SLS(Safely-Limited Speed)
- 翻訳:【速度監視(徐行)】
- 動き: 止めるのではなく、「指定した速度(例:10mm/s)以上出さない」ように監視します。
- メリット: 安全柵の扉を開けたまま、安全な超低速でティーチングや段取り替えができます。
導入の最大メリットは「復旧スピード」
「配線が楽になる」のも大きなメリットですが、現場にとって一番嬉しいのは「チョコ停からの復帰スピード」です。
タクトタイムに厳しい現場では、この差が決定的になります。
- 今まで(MC遮断):
- ライトカーテン遮光
- MC遮断(全電源断)
- 制御電源も落ちるため、位置情報が確定しない
- 再起動後に原点復帰が必要(数分のロス)
- これから(機能安全):
- ライトカーテン遮光
- STO(動力だけ遮断) or SOS(停止維持)
- 制御電源は生きている(位置も覚えている)
- リセットボタン1つで、即座に生産再開!(0秒復帰)
「安全のために止める」ことのハードルが下がるため、結果として生産効率と安全性の両立が可能になります。
なぜ「ネットワーク」で安全が守れるの?
「LANケーブルなんて、通信エラーやバグがあったらどうするんだ! 信用できん!」 そう思うベテランの方も多いでしょう。もっともな意見です。
しかし、J5が採用している「CC-Link IE TSN」の安全通信は、国際規格(IEC 61508)で認証された鉄壁の仕組みで守られています。
- ブラックチャンネル技術: 通常の通信データの中に「安全専用の封筒」を混ぜて送ります。この封筒は、通信経路上のハブやケーブルがどうなっていようと、中身(安全データ)が壊れていないかを厳密にチェックします。
- 二重化と時間監視: データを二重にチェックし、かつ「到着が遅れた」だけでも即座にエラーとして安全側に倒す(停止する)設計になっています。
この「何かあったら、迷わず安全側(停止)に倒れる」という設計があるからこそ、黄色いケーブルの代わりを務められるのです。
【参考】世界標準「CIP Safety」と同じ仕組みです
勘の鋭い方は気づいたかもしれませんが、この「ブラックチャンネル」という考え方は、ODVAが策定した国際標準ネットワーク「CIP Safety」(EtherNet/IPなどで採用)と全く同じです。
どちらも「通信ケーブルは信用しない、中身(データ)を厳重にチェックする」という国際標準(IEC 61784-3)のルールに基づいています。 違うのは「喋っている言語(プロトコル)」だけで、安全を守るロジックは世界共通の技術が使われているのです。
※ブラックチャンネルの詳しい仕組みについては、以前の記事で解説しています。

まとめ:安全は「止める」から「共存する」へ
MR-J5の機能安全(ネットワーク方式)を導入すると、現場はこう変わります。
- 配線地獄からの解放: CN8への配線が不要。LANケーブル1本で安全回路が組める。
- 復旧時間の短縮: 電源を切らないので、リセット1秒で再開できる。
- 柔軟な停止制御: 減速停止(SS1)や停止維持(SOS)で、人と機械が共存できる。
「安全回路の図面を書くのが大変だな……」と思ったら、一度「CC-Link IE TSN」のリモートI/OとMR-J5の組み合わせを検討してみてください。 そこには、シンプルでスマートな未来の工場の姿があります。
サーボ制御マスターへの道(実務力強化ロードマップ)
サーボモータは「回ればいい」ものではありません。狙った通りにピタッと止め、振動を抑え、安全に稼働させて初めて「制御」と呼べます。
以下の記事を順に読み進めれば、現場で「なんとなく」触っていたサーボのパラメータや挙動が、理論の裏付けを持って理解できるようになります。 「とりあえずオートチューニング」から卒業し、自分の意図でモータを操れるエンジニアを目指しましょう!