「J5の立ち上げ、どうしてます?」 「とりあえずソフト繋いで、ワンタッチ調整ボタンをポチッとしてます」
最近、そんな現場をよく見かけます。 数々の装置立ち上げを行ってきた現役エンジニアとして言わせてもらえば、それは少し危険です。
そのボタンを押した後、「なんで動きが良くなったのか(あるいは悪くなったのか)」を説明できますか?もしあなたが、「先輩に言われたから」「とりあえず押せばいいらしいから」という理由だけで使っているなら、トラブルが起きた時に対処できません。
今回は、脱・初心者のための「J5の正しい調整フロー」と、便利機能の裏側にある「ワンタッチ調整の正体」について解説します。
結論から言うと、ワンタッチ調整の裏側には、機械を極限まで追い込む「鬼のようなコンサルタント」が潜んでいます。 その正体を知らずにボタンを押すと、機械がフィルタ(ガムテープ)だらけにされてしまうかもしれません。
まず整理! 4つの調整モード、何が違う?
「似たような名前がいっぱいで分からん!」という人のために、まずはJ5の調整モードを「動き」と「目的」でスッキリ整理しましょう。
1. クイックチューニング(J5の新常識)
- 動き: サーボON時などに、その場で「ブルッ」とわずかに振動(微動)させて測定します。 ※マニュアルには「静止状態」と書かれていますが、実際にはパラメータ(PB44)で許可された範囲内で微動してデータを取ります。
- 役割: 【問診】 J5のデフォルト。まずはこれ。普通の搬送装置なら一瞬で終わるこのモードで十分です。
2. ワンタッチ調整
- 動き: 指定した「動作範囲」の中で、実際に行き帰り運転(往復運動)をさせて測定します。
- 役割: 【精密検査&手術】 クイックで満足できない(もっと攻めたい、振動が消えない)時の「リリーフエース」。 ※今回の記事の主役です。
3. オートチューニング(リアルタイム)
- 動き: 実際の機械の運転サイクル(タクト運転)をさせながら、裏でリアルタイムに測定します。
- 役割: 【実地訓練】 J4時代からの基本モード。「運転中に負荷が変わる(アームが伸縮するなど)」場合は、ワンタッチ調整ではなくこちらを使います。
4. 2ゲイン調整モード
- 動き: ゲイン(モデル制御ゲイン)を固定、または手動で合わせに行きます。
- 役割: 【シンクロ】 X-Yテーブルなどで「補間運転(円を描くなど)」をする時に、2軸のタイミングをピタリと合わせるための特殊モードです。
「とりあえずオートチューニング」は思考停止?
現場の先輩はこう言うかもしれません。「おいおい、基本は『オートチューニング(リアルタイム)』だろ? 運転中に自動で合わせてくれるアレが一番楽で確実じゃないか」
その感覚、少しアップデートが必要です。 MR-J5では、メーカーが推奨する「調整のフロー(優先順位)」が明確に定義されています。
そして、「負荷変動がない機械」において、オートチューニングを使い続けることは、せっかくのサーボの性能をドブに捨てているのと同じかもしれません。
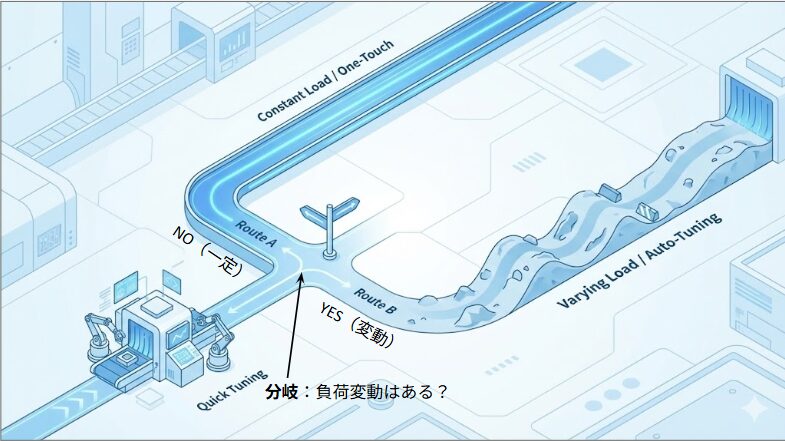
まず、J4でもJ5でも変わらない「運命の分かれ道」があります。 それは、「運転中に負荷(イナーシャ)が変動するか?」です。
- 負荷変動あり(アーム伸縮、ワーク把持など):
- これは「オートチューニング(リアルタイム)」の独壇場です。
- 運転中に刻々と変わるイナーシャを追いかける必要があるため、パラメータを固定するワンタッチ調整は使えません(使いません)。
- 負荷変動なし(搬送、円盤回転など):
- ここが問題です。
- 「オートチューニングでも動くからいいや」と思っていませんか?
- 変動しないなら、「ワンタッチ調整」で最適な値をビシッと決めて固定する(フィックスする)方が、追従性も精度も圧倒的に高くなります。
J5はまず「クイック」から
さらにJ5では、この分岐の前に「クイックチューニング」という新しい儀式が追加されています。
- 【Step 1】まずは「クイックチューニング」
- 運転前(微動のみ)に一瞬で終わります。
- 多くの装置はこれで十分です。
- 【Step 2】満足できない場合、道が分かれる
- 負荷変動があるなら ⇒「オートチューニング」へ。
- 負荷変動がないなら ⇒「ワンタッチ調整」へ。
では、その「ワンタッチ調整」ボタンを押すと、サーボアンプの中で何が起きるのでしょうか? そこには、オートチューニングのような「走りながらなんとなく」ではない、明確な「荒療治」が存在します。
ワンタッチ調整の正体:鬼コンサルによる3ステップ
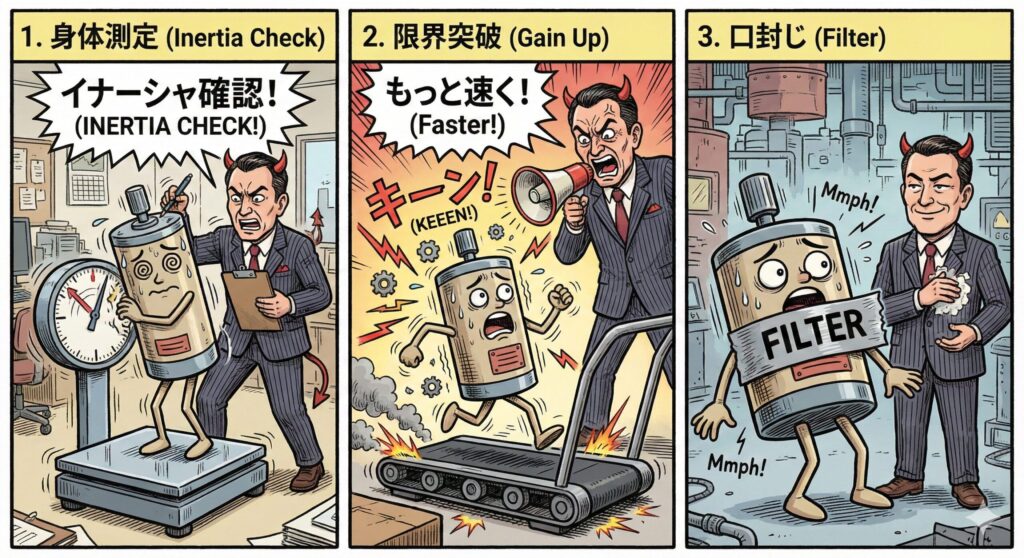
ボタンを押して「調整中…」と表示されている数秒間。サーボアンプの中では、「外部から招かれた冷徹な鬼コンサルタント」による組織改革が行われています。
1. 身体測定(イナーシャ推定)
コンサルはまず、現場の作業員(モーター)を往復運転で揺さぶります。「お前、本当はどれくらいの荷物を持ってるんだ? 正直に言え!」
これが「負荷慣性モーメント比の推定」です。オートチューニングのように実際の運転に混ざって受動的に測るのではなく、能動的に「加減速トルク」をかけて正確な体重を暴き出します。負荷変動がないからこそできる、一度きりの精密検査です。
2. 限界突破テスト(ゲインアップ)
体重が分かったら、次はスパルタ指導です。コンサルは、社長(位置)や部長(速度)に対して、「もっと命令を早くしろ!」「もっと厳しくしろ!」と、ゲイン値を極限まで上げさせます。
「まだいけるだろ! もっと速く!」値をどんどん上げていき、現場が耐えきれずに「キーン!(発振)」と悲鳴を上げるギリギリのライン(限界ゲイン)を見極めます。
3. 口封じ(フィルタ設定)
ここが一番恐ろしいところです。もし現場から「キーン!」という悲鳴(機械共振)が上がったら、コンサルはどうするか?
ゲインを下げてあげる……のではありません。「うるさい! その周波数の声を出すな!」と、口にガムテープ(ノッチフィルタ)を貼るのです。
悲鳴が聞こえなくなったら、「よし、静かになったな。じゃあもっとゲインを上げよう!」と、さらに追い込みます。
恐怖の選択肢:「応答性」設定の罠
ワンタッチ調整の画面にある「応答性」(Highモード・ベーシックモード・Lowモード)。これ、何も考えずに「とりあえず『High』にしておこう」と選んでいませんか?
この設定は、「コンサルタントの厳しさ(スパルタ度)」を決めるものです。
- 応答性「High」:超スパルタです。「少しのサボりも許さん!」と、機械がガタガタ震える寸前までゲインを上げまくります。剛性(硬さ)のある、ガッチリした機械なら最高の結果を出しますが、剛性の低い機械(ベルト駆動など)でこれを選ぶと、フィルタだらけの「満身創痍のパラメータ」が出来上がります。
- 応答性「Low」:優しい指導です。「まあ、揺れない程度にやってよ」と、そこそこの値で止めてくれます。アームが長い機械や、ベルトがたわむ機械は、迷わずこちらを選んでください。
「調整完了」の後に見るべき2つの数字
ボタンを押して「成功」と出ても、プロなら必ず「結果(パラメータ)」を確認してください。コンサルが帰った後、あなたのサーボアンプには以下の爪痕が残っています。
① 負荷慣性モーメント比(PB06)
ここに入った数値を見てください。もし「30倍(3000%)」近い値になっていたら要注意です。
前回の記事で言った通り、30倍は制御の限界です。ベルトが滑って測定ミスをしているか、そもそも設計上の選定ミス(イナーシャ過大)の可能性があります。
② 機械共振抑制フィルタ(PB13, PB15…)
ここに数値(周波数)が入っているか確認してください。1つか2つなら正常ですが、もし3つも4つもフィルタが入っている場合、それは危険信号です。
「あちこちガタガタで悲鳴を上げまくったので、全身ガムテープまみれにして無理やり黙らせた」状態だからです。今は動いていても、経年劣化で少しでもガタが増えれば、すぐに再発振します。
もしフィルタだらけになっていたら?
それは「やりすぎ」です。以下の対策を行ってください。
- 応答性を下げる: 「High」から「ベーシック」へ下げて、再度ワンタッチ調整を行う。
- 剛性を上げる: カップリングのネジ増し締めや、取り付け剛性の見直しを行う。
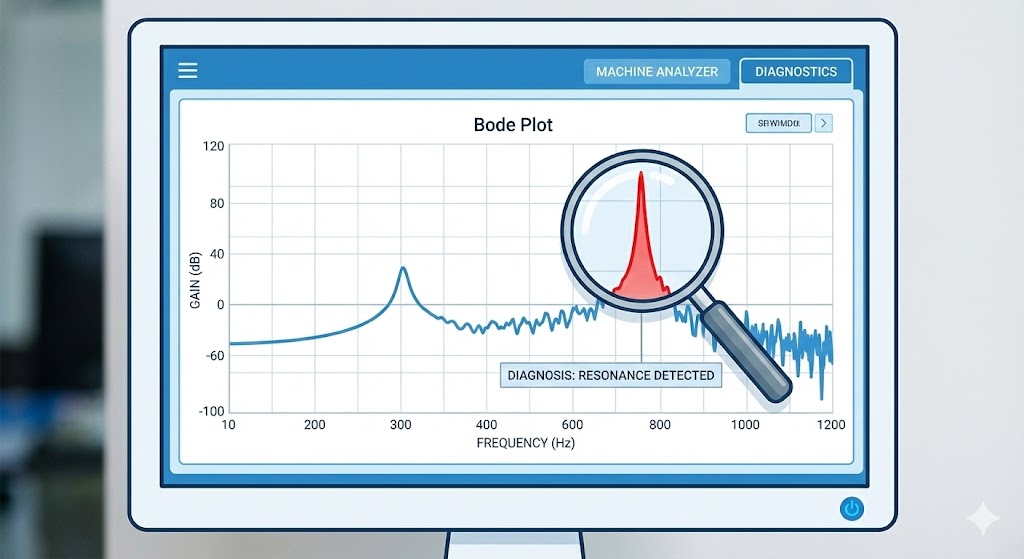
- 【上級編】マシンアナライザで「レントゲン」を撮る: ワンタッチ調整が勝手にフィルタを入れたということは、その周波数で機械が「悲鳴(共振)」を上げている証拠です。 MR-Configurator2の「マシンアナライザ」機能を使えば、その悲鳴を波形として可視化(レントゲン撮影)できます。 「ああ、500Hzでこんなに大きく揺れてる。これはカップリングの緩みだな」と、推測ではなく事実に基づいて機械を直せるようになれば、あなたはもう初心者卒業です。
まとめ:J5の作法をマスターせよ
- まずは「クイック(微動)」。これでダメなら分岐点。
- 負荷変動あり ⇒ 「オートチューニング」。
- 負荷変動なし ⇒ 「ワンタッチ調整」。
- ワンタッチ調整の中身は「強制測定 → 限界までゲインアップ → フィルタで口封じ」。
- 完了後は必ず「イナーシャ比」と「フィルタ数」で、機械の健康状態をチェックせよ。
「オートチューニングにしておけば安心」ではなく、機械の特性に合わせて最適な「鬼」を使いこなすのが、プロのFAエンジニアです。
さて、ここまでやっても収まらない「アーム先端の揺れ」。これを止めるには、モーター側の制御だけでは限界があります。
次回は、J5シリーズの目玉機能「制振制御」について解説します。なぜモーターは、自分の軸ではなく「遠く離れたアームの先端」の揺れを止められるのか? そのミステリーに迫ります。
【参考】ワンタッチ調整で書き換わるパラメータ一覧
ワンタッチ調整を実行すると、以下のパラメータが自動的に最適値へ変更されます。
- 基本制御パラメータ
PA08:オートチューニングモードPA09:オートチューニング応答性PA24:機能選択A-4PB06:負荷慣性モーメント比/負荷質量比
- ゲイン・制御定数
PB07:モデル制御ゲインPB08:位置制御ゲインPB09:速度制御ゲインPB10:速度積分補償PB12:オーバシュート量補正
- フィルタ(共振抑制)
PB01:アダプティブチューニングモードPB13/PB14:機械共振抑制フィルタ1 / ノッチ形状選択1PB15/PB16:機械共振抑制フィルタ2 / ノッチ形状選択2PB46/PB47:機械共振抑制フィルタ3 / ノッチ形状選択3PB48/PB49:機械共振抑制フィルタ4 / ノッチ形状選択4PB50/PB51:機械共振抑制フィルタ5 / ノッチ形状選択5PB17:軸共振抑制フィルタPB18/PB23:ローパスフィルタ設定 / 選択PE41.0:ロバストフィルタ選択
- 制振制御(先端振動抑制)
PB02:制振制御チューニングモードPB19〜PB22:制振制御1(振動・共振周波数/ダンピング)PB52〜PB55:制振制御2(振動・共振周波数/ダンピング)
- その他
PB03:位置指令加減速時定数
サーボ制御マスターへの道(実務力強化ロードマップ)
サーボモータは「回ればいい」ものではありません。狙った通りにピタッと止め、振動を抑え、安全に稼働させて初めて「制御」と呼べます。
以下の記事を順に読み進めれば、現場で「なんとなく」触っていたサーボのパラメータや挙動が、理論の裏付けを持って理解できるようになります。 「とりあえずオートチューニング」から卒業し、自分の意図でモータを操れるエンジニアを目指しましょう!