「ハンチングが止まらない…とりあえずゲインを下げてみよう」 「位置ループゲイン? 速度ループゲイン? 速度積分補償? …どれを触ればいいんだ!?」
サーボのパラメータ設定画面を開いて、絶望したことはありませんか? 名前が似すぎなんですよね。マニュアルを見ても「応答性を上げます」としか書いてなくて、「だから、どれを!?」となりがちです。
でも、安心してください。 数々のサーボ調整に携わってきた現役エンジニアの視点で見ると、サーボの中身は単純な「3重の入れ子構造(マトリョーシカ)」になっています。
この構造さえ理解してしまえば、もうパラメータの海で溺れることはありません。 今回は、サーボ内部の「縦割り組織」について解説します。
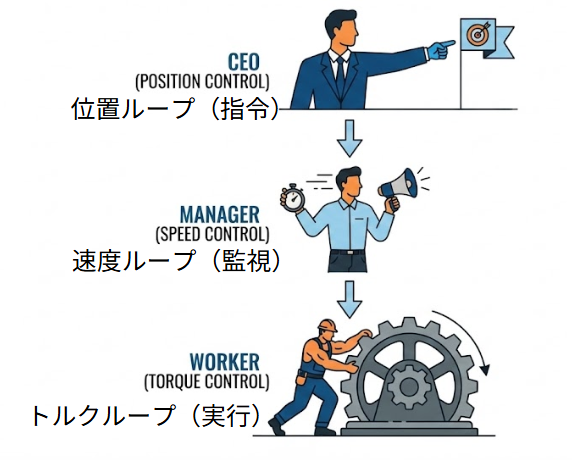
結論から言うと、サーボは「社長・部長・現場」の縦社会で動いています。
……ですが、この「上下関係」を知らずに、いきなり社長(位置ゲイン)だけ強くするとどうなるか?
現場の状況も知らずに「結果だけ」を求める「ワンマン社長」の暴走と同じことが起きます。 「とにかく急げ!」と怒鳴り散らす社長に対し、現場はパニックになって走り回り、結果として転倒(ハンチング)してしまいます。
そうならないための「正しい教育順序(ゲイン調整)」についても解説します。
※まだ「サーボは借金を返す機械だ」という話を知らない方は、先にこちらを読んでください。※この「借金」の概念がないと、今回の話は半分も理解できません。

サーボは「社長・部長・現場」の縦社会だ
教科書に出てくる「制御ブロック図」を見ると、矢印だらけで頭が痛くなりますよね。 あれを分かりやすく、「会社組織」に置き換えてみましょう。
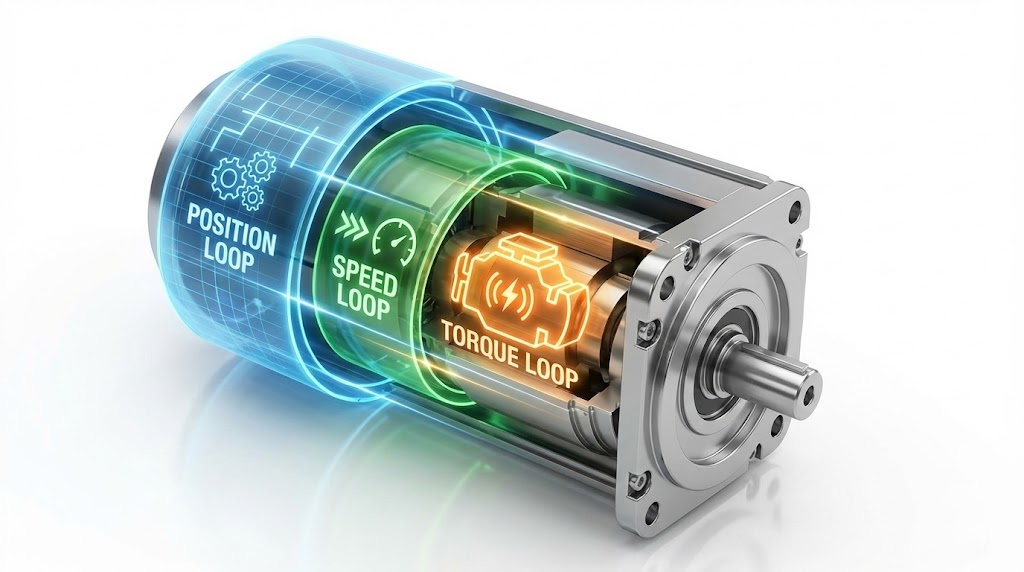
サーボの中には、3人の登場人物がいます。外側から順番にこうなっています。
- 位置ループ(社長)
- 速度ループ(部長)
- トルクループ(現場作業員)
① 位置ループ(社長):結果しか見ない
一番外側にいるのが「位置制御」担当の社長です。 彼は「ゴール(座標)」しか見ていません。
- 役割: 「指令パルス(目標)」と「現在位置」のズレを見る。
- 命令: 「おい部長! まだ到着してないぞ! もっと急げ!」(=速度指令を出す)
- 特徴: 現場の苦労は知らない。「とにかくあそこに行け」と言うだけ。
② 速度ループ(部長):プロセスを管理する
真ん中にいるのが「速度制御」担当の部長です。 彼は社長から「急げ(速度指令)」と言われ、モーターの「スピード」を管理します。
- 役割: 「社長の言った速度」と「現在の速度」のズレを見る。
- 命令: 「おい現場! 社長が急げと言ってる! もっとパワーを出せ!」(=トルク指令を出す)
- 特徴: 社長と現場の板挟み。サーボ調整の要(かなめ)。
③ トルクループ(現場作業員):汗をかく
一番内側にいるのが「電流制御」担当の現場作業員です。 彼は難しいことは分かりませんが、部長に言われた通りの「力(電流)」を出します。
- 役割: 「部長の言ったトルク」通りに電気を流す。
- 実行: 実際にモーターを回す。
どうですか? サーボの中では、この「命令のリレー」が超高速で行われているんです。
「これを実際の制御ブロック図で見ると、こうなります」

どうですか? 「社長・部長・現場」の位置関係が、実際の回路図とも一致していますよね。
なぜ「位置ゲイン」だけ上げてもダメなのか?
この「組織図」が頭に入っていると、新人がやりがちな「調整ミス」の理由がはっきり分かります。

【よくある失敗】 「タクトタイムを縮めたいから、位置決めを速くしたい! よし、位置ループゲイン(社長の命令)を上げよう!」
これ、現実の会社で想像してみてください。
現場(トルク)や部長(速度)がダラダラ仕事をしているのに、社長だけが「早くしろ! 何やってるんだ!!」と怒鳴り散らしている状態です。 どうなりますか?
- 現場はパニックになり、無理に走って転ぶ(オーバーシュート)。
- 組織全体がギスギスして震えだす(ハンチング)。
そう、「内側(現場・部長)」が育っていないのに、「外側(社長)」だけ強くしても意味がないんです。
鉄則:「内側」から鍛え上げろ
サーボ調整の絶対ルール。それは「マトリョーシカの内側から強くする」ことです。
- トルクループ(現場): 今のサーボは超優秀なので、ここは最初から最適に設定されています(ユーザーは触らなくていいことが多い)。
- 速度ループ(部長): ★ここが一番大事! まずは部長を鍛えます。「社長の命令に対して、遅れずに追従しろ!」と速度ループゲインを上げます。
- 位置ループ(社長): 部長がキビキビ動くようになって初めて、社長の命令(位置ゲイン)を強くします。
現場が優秀なら、社長が多少無理を言っても(ゲインを上げても)、サッと動いてピタッと止まれるわけです。
前回の「借金」はどうなった?
前回解説した「偏差カウンタ(借金)」の話、覚えていますか? 実はこの組織の中で、借金は「たらい回し」にされています。
そもそも「偏差カウンタ(借金)」って何だっけ?という方は、こちらの記事で復習してください。 [サーボがピタッと止まる「偏差カウンタ」の仕組みを復習する]
- 位置偏差(社長の借金): 「まだゴールに着いてないぞ!」という距離の借金。これを返すために、社長は「スピードを出せ」という命令書(手形)を部長に渡します。
- 速度偏差(部長の借金): 部長は手形を受け取り、「スピードが足りないぞ!」という速度の借金を背負います。これを返すために、「電流を流せ」と現場に命令します。
最終的に、現場が汗水流して(電流を流して)モーターを回すことで、すべての借金が返済され、組織は平穏を取り戻します(=位置決め完了)。
まとめ:調整の順番を間違えるな
- サーボの構造: 外側から「位置(社長)」「速度(部長)」「トルク(現場)」の3重ループ。
- 調整の鉄則: 内側のループほど、応答性(反応速度)を高く設定しなければならない。
- 現場の心得: 「位置決めが遅い」と思ったら、社長を怒らせる前に、まず部長(速度ゲイン)を鍛えろ。
これで、パラメータ一覧を見た時の景色が変わりませんか? 「ああ、これは部長への命令だな」「これは社長の設定だな」と、役割分担が見えてくるはずです。
さて、組織(ゲイン)を完璧に鍛え上げたのに、「なぜか止まれない(暴走する)」というケースがあります。 その犯人は、組織の外にある「物理的な暴力(慣性モーメント)」です。
次回は、サーボ選定で最も重要なのに、最も無視されがちな「イナーシャ比の罠」について解説します。 これを知らないと、どんなに調整しても機械は壊れます。

サーボ制御マスターへの道(実務力強化ロードマップ)
サーボモータは「回ればいい」ものではありません。狙った通りにピタッと止め、振動を抑え、安全に稼働させて初めて「制御」と呼べます。
以下の記事を順に読み進めれば、現場で「なんとなく」触っていたサーボのパラメータや挙動が、理論の裏付けを持って理解できるようになります。 「とりあえずオートチューニング」から卒業し、自分の意図でモータを操れるエンジニアを目指しましょう!